Simulation lifecycle
Each SST simulation goes through a number of stages, from start-up to exit. These stages are referred to as the SST Lifecycle. Component trees (i.e., a component together with its subcomponents and/or component extensions) are able to perform different actions in each stage through the Component APIs. These are the stages as viewed by elements in the simulation.
Lifecycle Stages
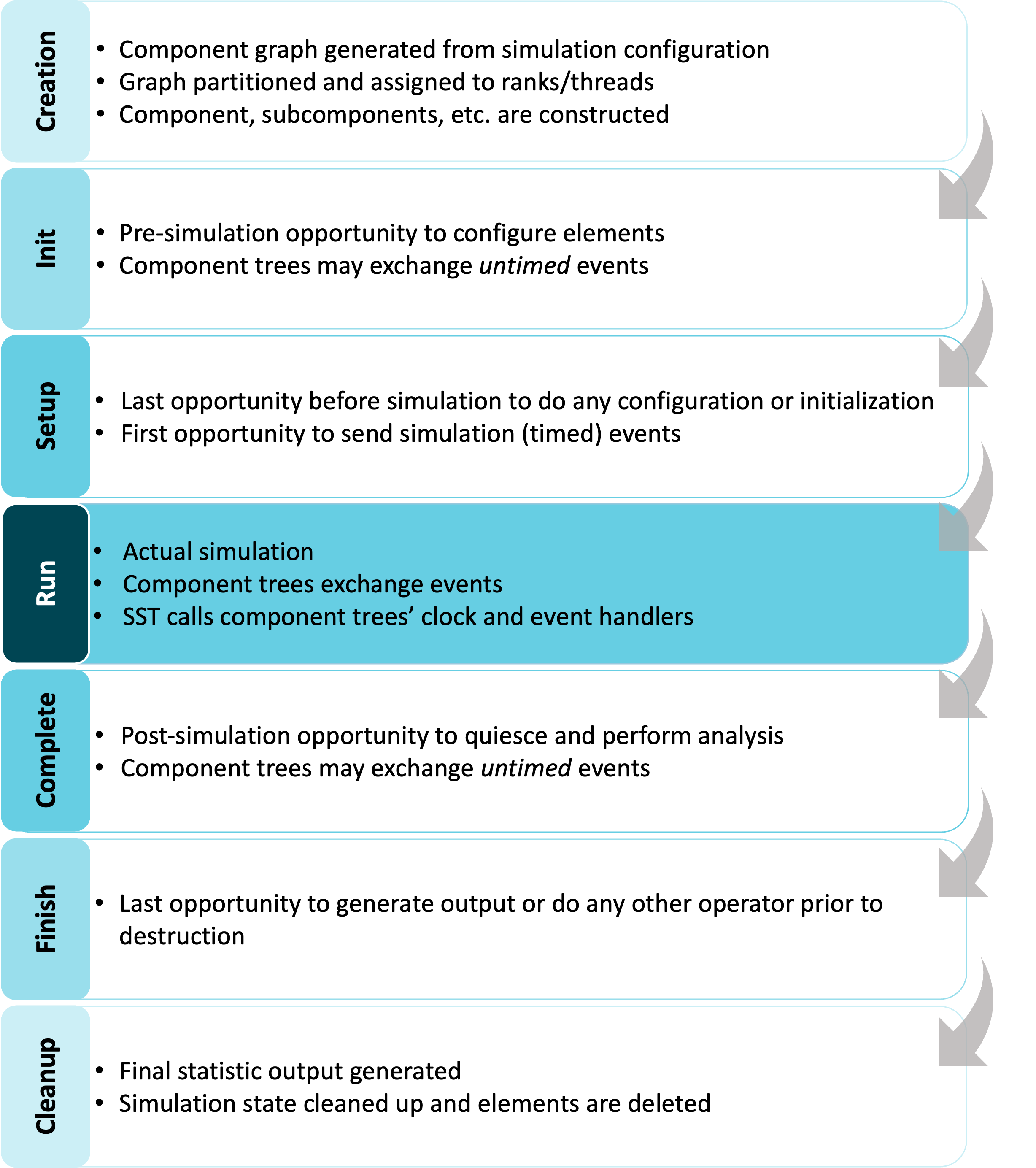
Init and Complete are multi-phase stages. They continue until component trees collectively stop exchanging events. Likewise, the Run stage continues until all primary components have signaled they are done or until SST runs out of events to execute.
Note that with the exception of Cleanup and Run, these stages involve component objects only. If a subcomponent or component extension needs to perform work in a stage, their parent component needs to call the relevant API function on that element. This allows components to control the execution order among their children.
Extra stages
Under normal circumstances, SST simulations proceed through each of these stages in order. However, certain triggers can cause SST to skip or short circuit stages. These triggers make use of two extra stage:
- Emergency shutdown
- In this stage, components are notified that the simulation is going to end prematurely. Both internal triggers, such as an
Output::fatal()call, and external triggers, such as aSIGTERMsignal, can lead to this stage.
- In this stage, components are notified that the simulation is going to end prematurely. Both internal triggers, such as an
- Print status
- In this stage, components are asked to report their status.
The stages in detail
Build (Creation)
API: Constructors such as the Component constructor and element loading functions such as loadUserSubComponent
The build stage largely takes place in the SST-Core. SST first reads the simulation input file; this may be python, json, a checkpoint manifest, or any other input type that SST recognizes. The file defines a graph of components that SST will simulate. SST performs the following actions on the graph:
- Generation SST processes the input file, generating a temporary ConfigGraph. This object represents the graph structure and contains information needed to construct simulation elements (e.g., parameters).
- Partitioning The ConfigGraph is partitioned for ranks and/or threads. This step is skipped for serial simulations and pre-partitioned ("parallel loaded") configurations.
- Distribution The ConfigGraph is distributed to each rank in the system. This step is skipped for serial simulations or pre-partitioned ("parallel loaded") configurations.
Each parallel partition then builds its own portion of the graph, invoking component constructors which in turn load any other elements the component needs (such as subcomponents). The following activities should be completed during this stage.
- Link configuration
- Statistics must be registered
- Any SharedObjects must be initialized
- User subcomponents should be loaded
- Parameter objects passed to element constructors are deleted after the constructor returns. Elements should save any information they may need from the parameter object before their constructor ends.
Init
API: init()
The init stage runs in multiple phase. In each phase, the SST Core calls every component's init() function, giving them an opportunity to exchange events. Events sent in a phase are delivered in the following phase. If after a phase, no events have been sent, the init stage ends. Elements can participate in initialization using the init() function. This function takes a parameter, phase, that passes the number of phases that have occurred so far. Components should invoke the init() function of their subcomponents as needed.
Keep in mind these limitations of the init stage:
- Any event sent must use the untimed version of Link send.
- Event handlers are not active yet. Links should be polled using the untimed polling function,
recvUntimedData(). - Clock handlers are not active and simulation time is 0
At the end of the init stage:
- Event handlers and link time bases need to be finalized.
- Writes to SharedObjects must be complete. SharedObjects are read-only once setup begins.
Example: The merlin network routers use init to exchange bandwidth parameters and resolve any disagreements.
Example: The memHierarchy components use init to discover the memory system topology and generate memory address based routing tables.
Setup
API: setup()
The setup stage is a final opportunity to configure state prior the simulation beginning. In this stage, SST calls each component's setup() function once. Components should invoke the the setup() function of their subcomponents as needed. This is also the first stage in which regular events can be sent. Simulations in which no components are using clocks must ensure that at least one event is sent in this stage. If not, SST will have no events to process in the run stage and will immediately reach the end of simulation.
During this stage:
- SharedObjects are read-only
- Events should be sent using
send(). Untimed events may not be sent. - Simulations without clocks must send at least one event.
Run
API: Clock handlers and event handlers
The run stage is the actual simulation. In this stage, SST processes events, triggering event and/or clock handlers to progress the simulation. The run stage ends when (1) all primary components declare the simulation is done using primaryComponentOKToEndSim(), (2) there are no further events to process, (3) the simulated or wall-clock time specified by SST options (stop-at, exit-after) is reached, or (4) an abnormal exit condition occurs (e.g., a SIGTERM signal or call to output.fatal()). In case (2), the simulation will report a simulated time of MAX_SIMTIME_T, or the maximum time the simulation can reach per the simulation time base, though statistics will be correct. It is generally better for models to use methods (1) or (3) to end simulation.
In the run stage:
- Event handlers cannot be changed.
- Anonymous subcomponents may be loaded but they cannot register statistics.
- Clock handlers may be changed but must have been registered during the creation phase.
Complete
API: complete()
The complete stage is similar to the initialization stage. It runs in multiple phases, during which component trees may exchange untimed events. Exchange of timed events is no longer permitted as of this stage. A common use case for complete() is to globally aggregate data from across component trees to output during the finish stage. Elements participate by defining the complete() function. Components should invoke their subcomponents' complete() functions as needed.
Finish
API: finish()
Finish is a final opportunity for component trees to perform operations prior to their destructors being invoked. SST calls each component's finish() function once in this stage. Components should invoke their subcomponents' finish() functions as needed.
Cleanup
API: Destructors such as the Component destructor
During the cleanup stage, SST first generates a final statistic output if statistics are enabled. It then deletes each element in the simulation. Note that SST manages the following object types; elements should not delete these in their own destructors.
Objects deleted by SST-Core
- Clock::Handler
- Component
- ComponentExtension
- Event::Handler
- Link
- Module
- PortModule
- ProfileTool
- Statistic
- SharedObject
- SubComponent
- Any Event currently in flight in the SST-Core
Emergency shutdown
API: emergencyShutdown()
Calling Output::fatal(), sst_assert() or sending SST a SIGTERM or SIGINT signal all cause SST to call emergencyShutdown() on every component in the simulation. This is primarily used to clean up state that needs special handling, such as a subprocess that may be orphaned otherwise. It can also be used to report component status. Components should invoke their subcomponents' emergencyShutdown() functions as needed.
Print status
API: printStatus()
This is a special stage that is triggered by SST's default SIGUSR2 signal handler. Upon receiving a SIGUSR2, SST calls printStatus() on every component in the simulation. Elements should print their status in this stage. Components should invoke their subcomponents' printStatus() functions as needed.